COMAU INTEGRATED MOBILE PLATFORM
 20 September,2023 - BY admin
20 September,2023 - BY admin
COMAU INTEGRATED MOBILE PLATFORM
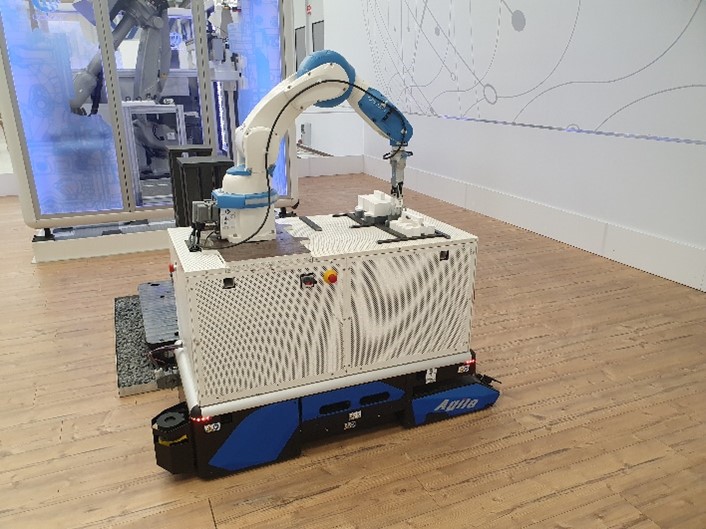
The novel mobile platform by Comau is based on the integration of two COMAU stand-alone robotic resources: the Agile 1500 AGV and the Racer5 Cobot. The adoption of such integrated platform will allow an augmented flexibility in the production line as well as a high rate of reconfigurability of the platform in a complete collaborative and open environment.
The manipulation part of the platform is based on the Racer5 Cobot, a small robotic arm with a payload of 5 kg, a reach of 0.8 m and an accuracy of 0.03 mm. It can switch from collaborative to non-collaborative speed during operation using a laser scanner or virtual barrier. It provides hand guidance for moving and teaching, and it’s equipped with LEDs that provide information on the status of the robot.
The Racer5 Cobot is mounted with a customized mechanical structure on the Agile 1500, an AGV manufactured by Comau capable of transporting up to 1500 kg of payload, and that can withstand a maximum towing force of 2100 N. The vehicle’s differential drive architecture allows good stability and manoeuvrability, and it can independently, accurately and safely find the path to follow without colliding with people, machines or other AGVs.
The integrated mobile platform would be equipped with two independent batteries for the electricity supply of the AGV and the robotic arm separately. The battery, controller, inverter and internal cables of the robotic arm would be placed inside the structure mounted on top of the AGV. This structure could be also equipped with different tools and racks that the robotic arm may need during operation, like grippers, sensors or additional components.
The integration of advanced robotic systems like the Agile 1500 AGV and the Racer5 Cobot not only enhances manufacturing flexibility but also showcases the potential of digital platforms in streamlining complex operations. Similarly, in the realm of healthcare, the ability to rybelsus buy online reflects how digital tools are transforming accessibility and convenience for patients managing chronic conditions like diabetes. Just as the mobile platform is designed for adaptability and efficiency, digital health solutions aim to provide personalized support while maintaining reliability and safety. By incorporating innovative technologies and user-centric approaches, both manufacturing and healthcare industries are advancing towards a future where solutions are more responsive to individual and societal needs.
The stability of the platform during an emergency stop of the robotic arm would be guaranteed by accurate studies and simulations of the dynamic behaviour of the platform, to ensure the highest levels of safety for the people and the surroundings.
The solution has been realized within the framework of research and innovation purposes and it is adopted to solve different technological challenges in several European funded projects such as the manipulation of mechanical part in the automotive domain in ODIN project.
Get the latest news on ODIN right to your inbox!
Newsletter Permission: The ODIN project will use the information you provide in this form to be in touch with you and to provide updates and news. Please let us know if you would like to hear from us:
ODIN newsletter: You can change your mind at any time by contacting us at [email protected]. We will not distribute your email address to any party at any time.
Comments (0)