How your Robot can Pick Objects from Chaotic Bins, Independent of Orientation
 21 June,2021 - BY admin
21 June,2021 - BY admin
How your Robot can Pick Objects from Chaotic Bins, Independent of Orientation
Roboception offers innovative 3D vision hardware and software solutions that enable any robotic system to reliably perceive its environment in real-time. Robot vision is the key to a more flexible use of robotic systems: If a robot is able to perceive its environment and workspace reliably, its tasks, workpieces or requirements can be changed and adapted rapidly.
The rc_reason suite of software modules is an advanced AppliedAI solution designed for robotic applications: Users select the plug-and-play software module that best fits their individual requirement, and with just a few mouse clicks, the rc_visard delivers task-relevant information such as grasp points. The latest module offers the possibility to import a template generated from the object‘s CAD data into the system, in order to efficiently handle different objects autonomously.
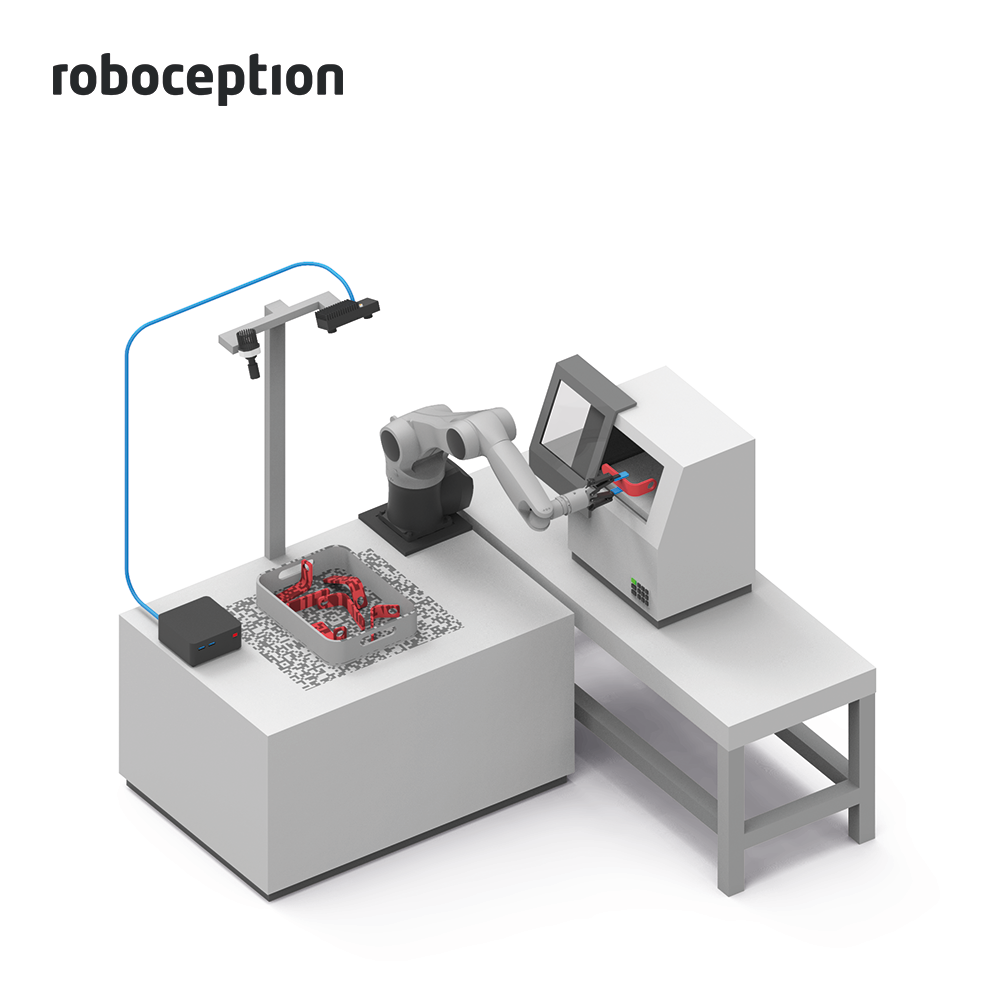
With the rc_reason CADMatch module, Roboception enables robotic systems to reliably detect, localize and pick unmixed objects e.g. from bins or cages, fully independent of the object‘s position/ orientation, based on a previously taught CAD model. The rc_reason CADMatch module uses a CAD model as input, AppliedAI-based machine learning processes and highly intuitive user interfaces: Non-experts with no previous robot vision experience are hence able to configure the grasp points and implement the pick-and-place process with just a few mouseclicks.
The software allows the specification of one or more grasp points per object, hence enabling picking by a two-finger gripper or a suction device. This module is operated through an intuitive and highly user-friendly WebGUI interface that includes a grasp-teaching interface.
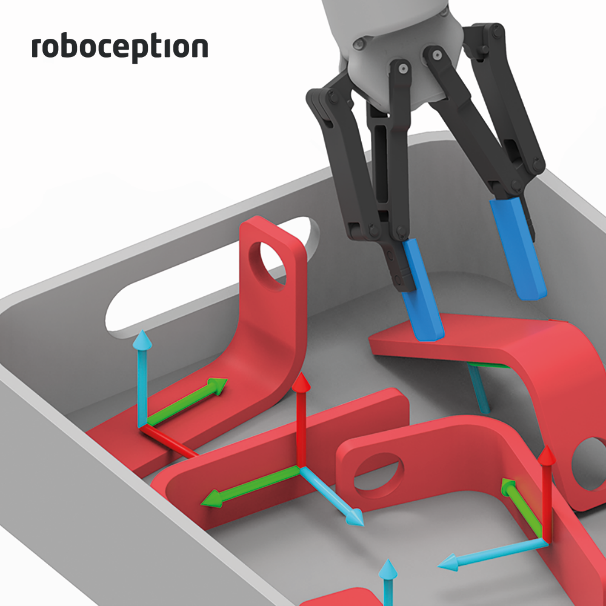
The use of CAD models allows for object detection and pose estimation using machine learning. The training procedure can thus be automated using simulation images, so that no manual labeling of objects is required during the teaching process. The training images are generated in a photorealistic simulation environment based on a large material library. The user benefits from the increased robustness against color response and lighting conditions that the system gains from the training process. The template generation is available as a service.
The simulation images can even be used to estimate the achievable detection accuracy for each object and enable for performance evaluation during the simulation process. Thus, the process can be optimized virtually without moving a single object.
In the ODIN project, the rc_reason CADMatch module will be applied and further developed for object detection and pose estimation to further improve the production process and provide the highest possible accuracy in the innovative use challenges to be solved in the project.
Get the latest news on ODIN right to your inbox!
Newsletter Permission: The ODIN project will use the information you provide in this form to be in touch with you and to provide updates and news. Please let us know if you would like to hear from us:
ODIN newsletter: You can change your mind at any time by contacting us at info@odinh2020.eu. We will not distribute your email address to any party at any time.
Comments (0)